 書物では"RLC回路"と表記されることが多いが, 回路方程式に現れるL, R, Cの順番から個人的には"LRC回路"の方が理解しやすく, 本稿ではそう表記している.
書物では"RLC回路"と表記されることが多いが, 回路方程式に現れるL, R, Cの順番から個人的には"LRC回路"の方が理解しやすく, 本稿ではそう表記している.
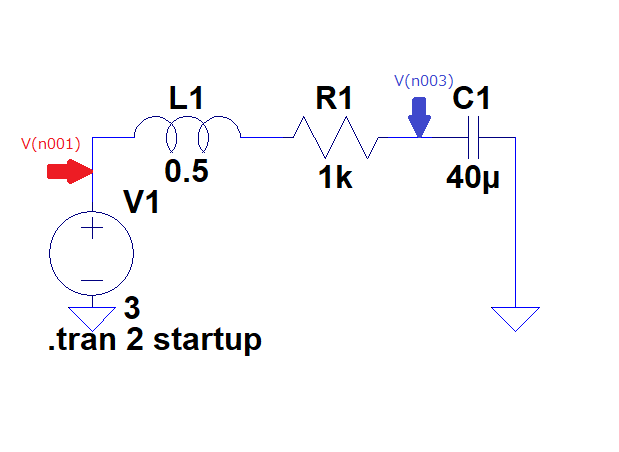
さて, 式(1)の両辺を時間t($0$から$t$まで)で積分する. \begin{equation} L\frac{dq}{dt}+RI+\frac{1}{C}\int_0^t qdt=\int_0^t V_i dt=f_i(t) \end{equation} 電流$I=\int_0^t dq $
式(2)左辺の第1項をD(Differencial:微分)動作, 第2項をP(Proportional:比例)動作, 第3項をI(Integral:積分)動作と称する. 微分動作(D動作)は, LRC回路において位相を遅らせる遅相(インダクタンス)を表す. 一方, 積分動作(I動作)は進相(キャパシタンス)を意味する.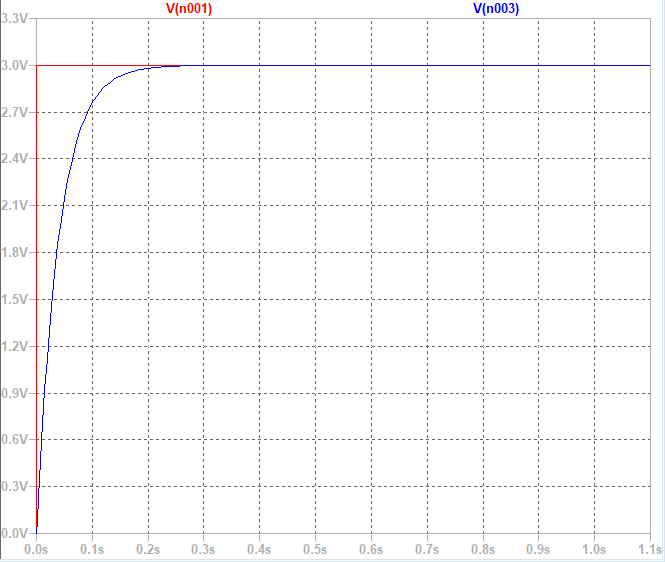 P, I, D動作が結合されたPID動作により, 出力電圧が入力電圧(この例の回路では$3V$)に近づく. 時間とともに応答が安定化していくステップ応答のイメージを表している.
個人的には, "PID動作"というよりは, L, R, Cの順番に足並みを揃えて, "DPI動作"と呼んだ方がしっくりくる.
index.htmlに戻る
P, I, D動作が結合されたPID動作により, 出力電圧が入力電圧(この例の回路では$3V$)に近づく. 時間とともに応答が安定化していくステップ応答のイメージを表している.
個人的には, "PID動作"というよりは, L, R, Cの順番に足並みを揃えて, "DPI動作"と呼んだ方がしっくりくる.
index.htmlに戻る